福島第一原発「燃料デブリ」取り出しへの挑戦③~海外の協力も得て挑む技術開発の最前線

(出典)Veolia Nuclear Solutions (UK) Ltd
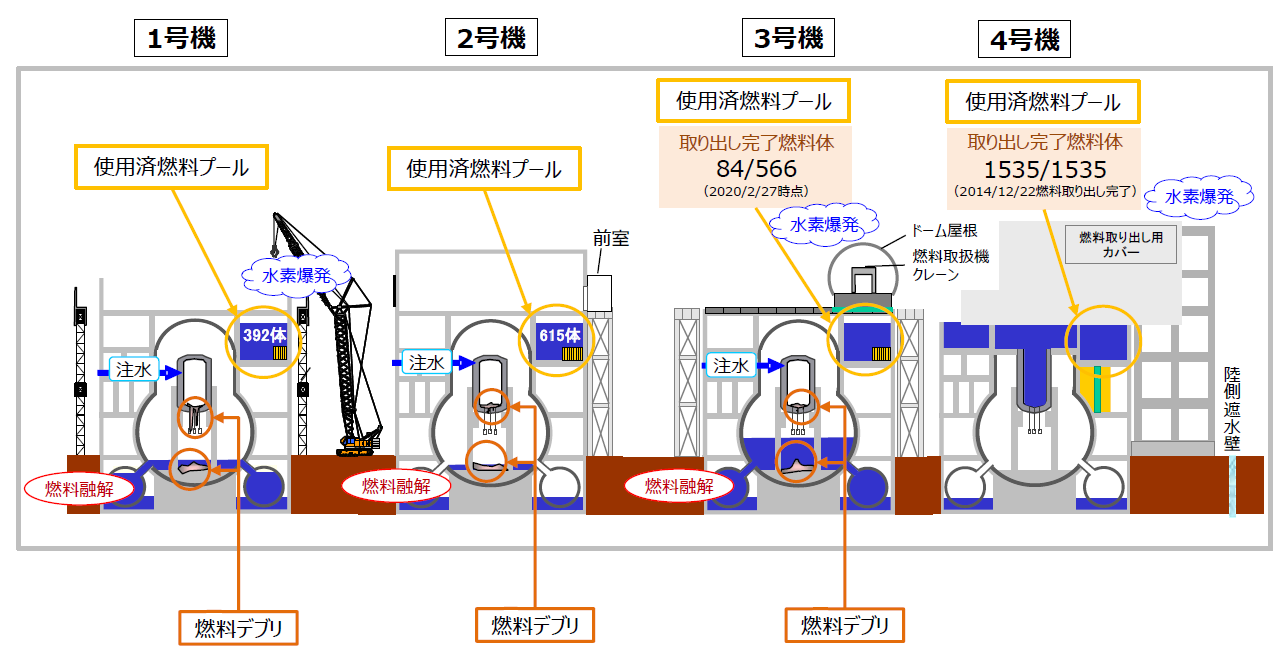
東京電力福島第一原子力発電所(福島第一原発)の廃炉に向けては、原子炉の内部にある「燃料デブリ」をどうやって取り出すかという課題があります。シリーズ第1回では、「燃料デブリ」や福島第一原発1号機~4号機の現在の状況について改めてご紹介し、第2回では、取り出しにはどのような課題があるのかをご紹介しました。第3回では、これまでにない挑戦である燃料デブリの取り出しを実現するため、どのような装置が開発されているのかを開発者へのインタビューとともにご紹介しましょう。
燃料デブリを取り出すため、さまざまな工夫が凝らされたロボットアーム
原子炉内部にあった燃料が溶けてさまざまな構造物と混じりながら固まることでできた燃料デブリは、福島第一原発の1号機・2号機・3号機内に存在しています。燃料デブリ取り出しを始める最初の号機としては、2号機に確定しました。
- 詳しく知りたい
- 福島第一原発「燃料デブリ」取り出しへの挑戦①~燃料デブリとは?
シリーズ第2回でもご紹介したように、原子炉格納容器の中に入り、原子炉圧力容器を支えるコンクリート構造物「ペデスタル」の内側の燃料デブリにアクセスするのは、並大抵のことではありません。まず、デブリが存在している原子炉格納容器内は、放射線量が高く、人が近づくことはできません。また、格納容器内はかなり狭く、格納容器の内部へアクセスするための貫通孔も、それほど大きなものではありません。さらに、格納容器内部に入った後も、ペデスタル内は狭く、原発事故によるガレキなどの堆積物が横たわっています。
何よりも、事故により格納容器内の状況が変化しており、燃料デブリや構造物の状況に関する情報も限定的で不確実性がある中、燃料デブリのある場所までアクセスし、燃料デブリを回収するには、さまざまな事態を想定して、事前にそれらの事態への対応策を検討の上、装置の設計などをおこなう必要があります。
また、堆積物の調査はまだ表面しかおこなわれていないため、堆積物の下がどれくらい固いかは今のところわかっていません。小石などと固まって一体になっているものについては、取り出しにあたって、切断などの加工が必要になると見られています。
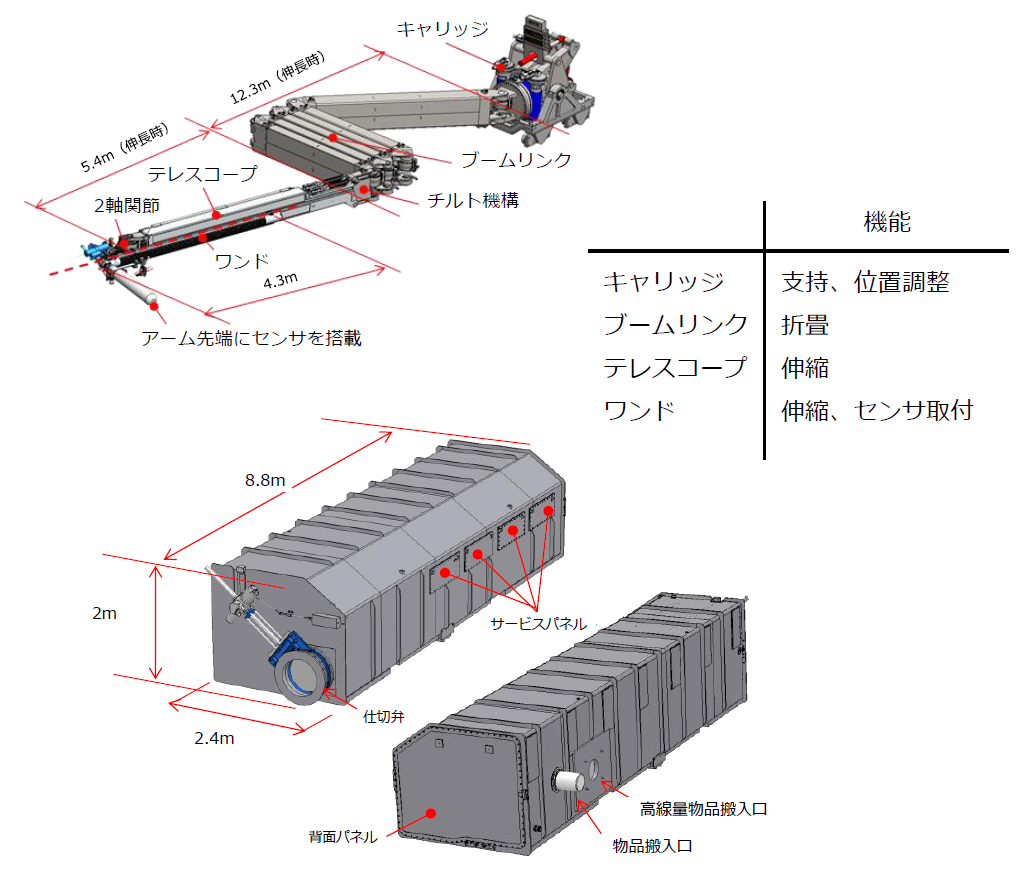
そこで、燃料デブリを取り出す方法として現在開発が進められている「ロボットアーム」には、さまざまな工夫が凝らされています。まず、取り出しにあたっては、放射性物質を含むダストの拡散を抑制するよう、「エンクロージャ」と呼ばれる箱で開口部にフタをすることが考えられています。
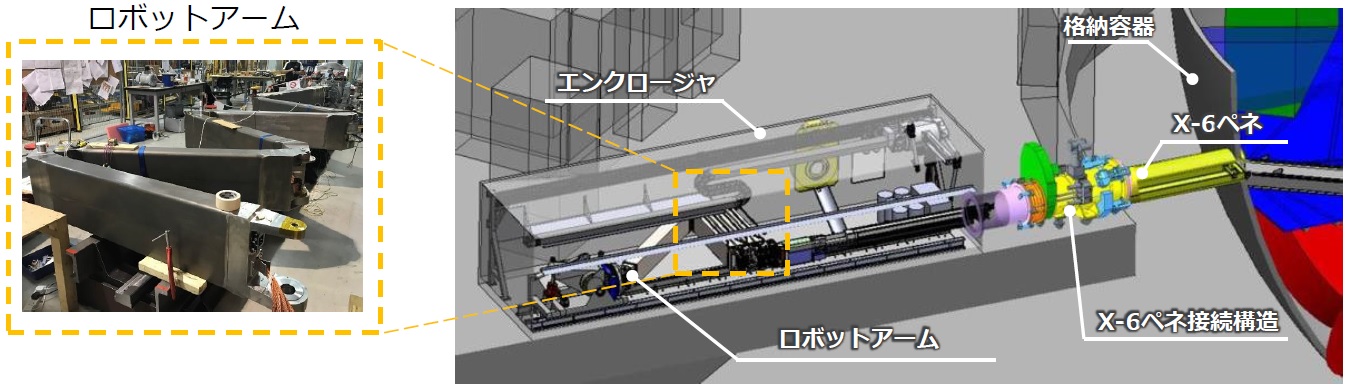
エンクロージャの中に納められたロボットアームは、折りたたまれた形になっており、アコーディオンのように伸びて、圧力容器底部やペデスタル内部に到達するように設計されています。また、このロボットアームは、伸ばした場合でも途中で大きくたわまないよう、強度のある金属素材で作られています。
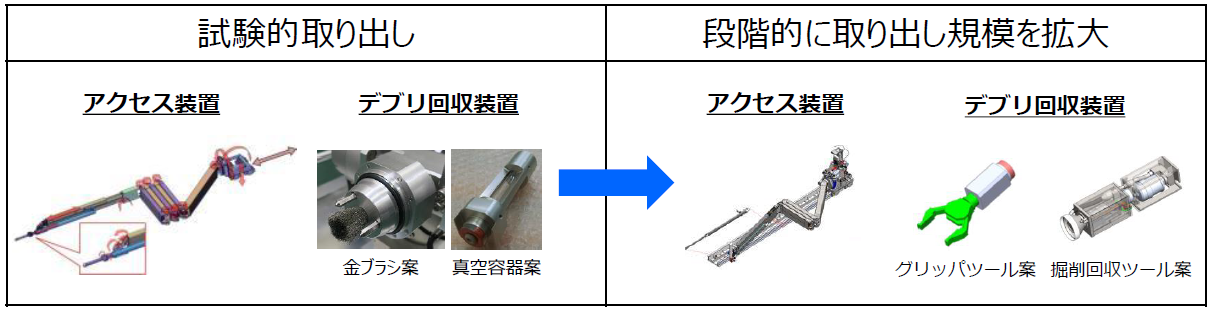
では、ロボットアームの先端は、どんな形になるのでしょうか。試験的取り出しに向けては、デブリをこすって粒を回収する「金ブラシ」や、粒を吸う「真空容器」を開発中です。今後、段階的に取り出し規模を拡大していく中では、もう少し重いものをつかむことができる「グリッパツール」や、デブリをくだいて欠片を吸う「掘削回収ツール」などが検討されています。
ロボットアーム開発に取り組む技術者に聞く、困難なミッションに挑む想い
ここからは、実際に装置の開発に取り組んでいる、三菱重工業株式会社の技術者に、開発の現状をうかがいましょう。
三菱重工業株式会社の辻田芳宏氏(左)と、上田剛史氏(右)
―お二人はどのようなものを開発しておられるのでしょうか?
上田 福島第一原発2号機の原子炉格納容器に関して、「ペネトレーション」と呼ばれる開口部から内部に入り、燃料デブリの取り出しをおこなうためのロボットアームを開発しています。
辻田 下の絵の箱のようなものの中にアームが収納され、ペネトレーションに据え付けられます。中からアームが伸びてペネトレーションを通って内部に入り、燃料デブリを回収するための「金ブラシ」や「真空容器」で燃料デブリを取り出すほか、先端に取りつけるセンサーを使って格納容器内の燃料デブリの分布や構造物の状況などを調査します。
上田 ペネトレーションのフタを開ければ放射性物質が漏れてしまうため、まずペネトレーションの周辺に箱を作り、その外には放射性物質が漏れないようにしてからフタを開ける必要があるのです。
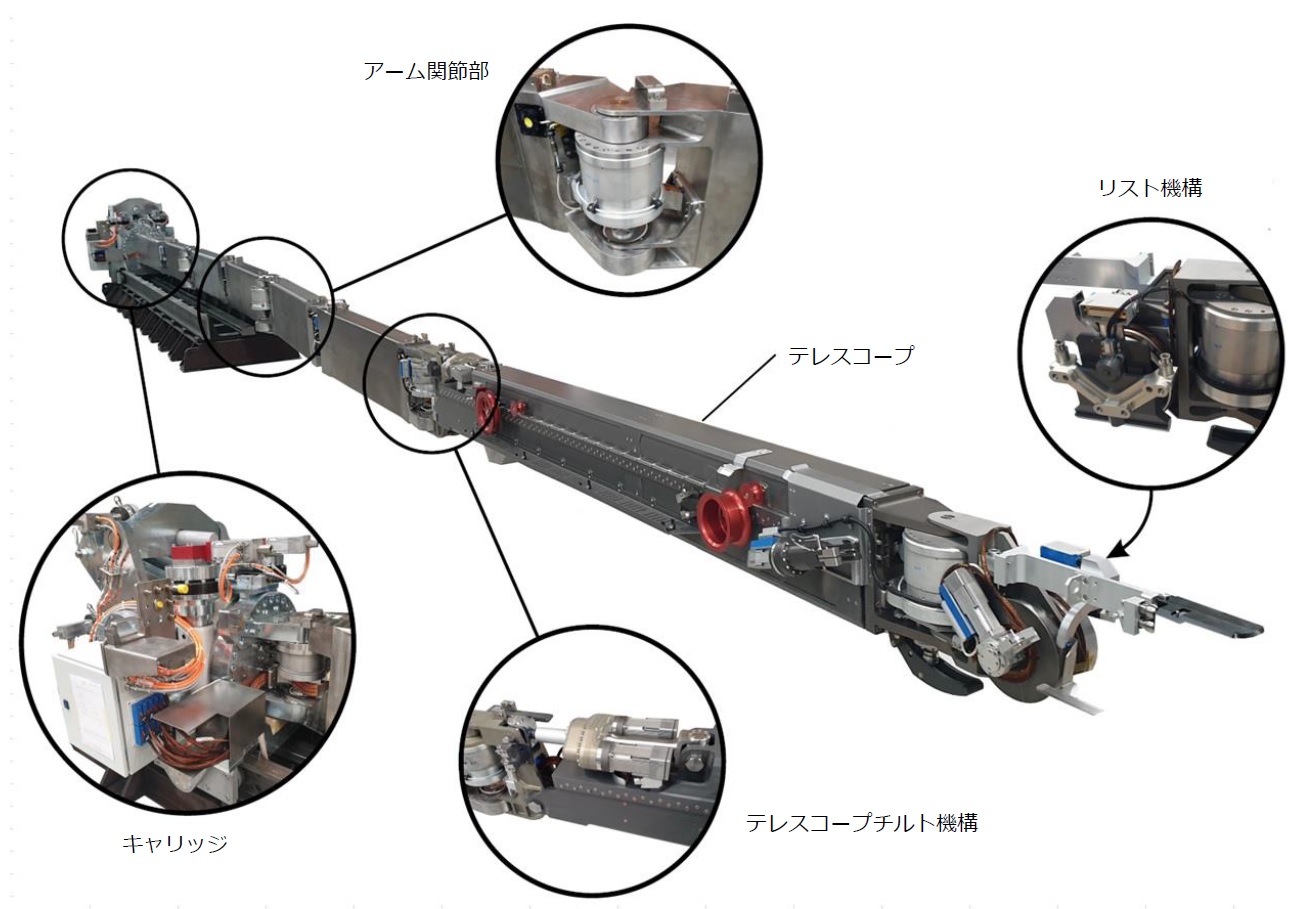
辻田 下の写真は、現在開発中のアームです。
―難しいと感じるのはどのような点ですか。

上田 まず、アームを入れる入り口(X-6ペネトレーション)から、調査をしたい場所、つまり燃料デブリがある場所までが遠いという点です。内部を撮影した写真で見ても、おおよそ10数メートルあります。そこを、アームを長く伸ばして、先端に付けた燃料デブリ回収装置での取り出し作業や、センサーでの調査をおこなわなくてはならない。
辻田 装置のアームを長く伸ばすために通常考えるのは、アームの強度を上げてたわまないようにすることです。しかし、ロボットアームを通そうとしている「X-6ペネトレーション」は直径約600mmしかなく、そこを通ることのできる寸法に納めなくてはならない。つまり、太くてゴツいものにはできないのです。さらに、通常であれば開口部の寸法を正確に測った後にアームを設計するのですが、2号機は人が中に入ることができないため、図面の情報と映像だけを基に寸法を想定して設計する必要があります。アームを太くしたい、しかし太くしすぎるとつっかえる、かといって細くするとたわむ…そのバランスを取るのがひじょうに難しい。
上田 もう一点は、内部情報の不足です。すでに簡易調査はおこなってはいますが、情報はそれだけしかありません。たとえば、原発事故のために変形している場所などがあれば、アームがそこにぶつかって壊れてしまうリスクがありますが、そういったことがまだまったくわかっていない。慎重にオペレーションをおこなう必要があります。
―ロボットアームの技術には、もともと何か類似のものがあったのですか?
上田 もともと、当社は原子炉の工事などで、遠隔ロボットを使っていました。ロボットアームについても実績はあったのですが、今回はせまくゆとりのないX-6ペネトレーションを通過できるような細長いアームを遠くへ到達させるというひじょうに難しい課題ですので、英国にあるVeolia Nuclear Solutions (UK) Ltd(通称:オックスフォードテクノロジー社)と協働し、アームを開発しています。世界中の技術を見て回ったところ、良い技術があったのが英国でした。彼らは核融合炉の開発をおこなっており、そのメンテナンスで長い「多関節アーム」による遠隔操作を適用しているため、その技術を今回の装置に採用しました。
辻田 我々は、原子炉の情報、どのような条件下で動かすのか、どのような操作手法が必要かなどを検討し、オックスフォードテクノロジー社へ設計条件として提示しています。それを受けて、オックスフォードテクノロジー社が装置や運転システムの設計と製造をおこなっています。開発モノであるため、一方通行の情報伝達ではなく、設計、製作の過程で我々とオックスフォードテクノロジー社で都度技術協議し、おたがいに協力しながら進めています。
―アームができあがったとしても、操作にも技術が必要そうですね。
上田 そうですね、18の軸を調整しながら操作する必要があります。

辻田 オペレーターが1個ずつのカメラの映像を見ながら軸を細かく制御していくという方法も不可能ではないのですが、その方法は合理的な運転操作ではありませんし、オペレーターに大きな心理的負担がかかります。そこで、事前に、各関節を動かせるプログラムを作っておき、ボタンで操作していくことを考えています。原子炉格納容器のモックアップ(実物大模型)を製作し、それを使ってプログラムの動きを検証しておく。ただ、2号機の内部がモックアップの通りだとは限りません。寸法が少し異なっていたり想定した形ではなかったりすると、その時点で立ち止まって判断する必要があります。あらかじめ想定ルートを考えておき、手順を詳細に決めておきつつ、何かあれば1度アームを止めて、そこまでの情報に基づき判断することが基本姿勢になるでしょう。
上田 まず英国の簡易なモックアップで、アームがペデスタル内部に到達できることを確認し、その後、福島県楢葉町に、より実物に近いモックアップの第二弾を作って、アームに「金ブラシ」や「真空容器」、センサーを搭載して遠隔操作の手法を検証するとともに、オペレーターのトレーニングをおこないます。実際に福島で使用する前に、モックアップ試験で不具合をきちんとつぶしておきたいと思います。
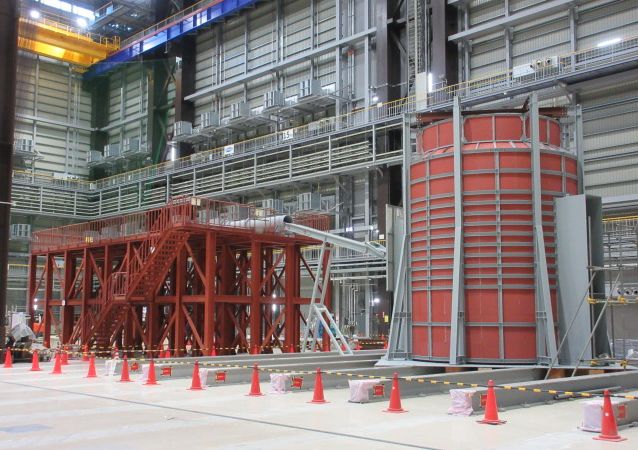
福島県楢葉町の原子炉格納容器のモックアップ(実物大模型)
―アームの操作はどのくらい離れておこなうのですか?
上田 いわゆる操縦席は、直線距離で100メートルくらい離れた場所に設けます。ただ、X-6ペネトレーションにアームを据えつける作業では、装置をそこまで遠隔で自走させても、ケーブルやホースは引きずって傷つけないように据えつけ場所でそれらを取りつけたり、照明や監視カメラの設置などの必要があり、すべて遠隔操作とするわけにはいかず、放射線量の高い場所で人が作業をおこなうことになります。当然、人が滞在して作業できる時間は限られてきますので、万が一、アームが壊れたり不具合が起きた場合は、現場へ修理に行くのにも時間の制限がかかりますので、そこも難しいところです。
―意気込みを聞かせていただけますか。
上田 とにかくプロジェクトを成功させたいという、その一念で取り組んでいます。まだまだ難しいことがこれから出てくると思いますが、関係者が知恵を絞ってやれば成功するのではないかと思っています。
辻田 デブリを取り出すことが、福島第一原発の状況を安定させるための大きな第一歩だと思います。難しい状況ではありますが、ひとつひとつ段階を踏んでいけばいつか成し遂げられると考え、挑もうと思っています。まずは目の前のことを確実にこなし、社会の信頼を少しずつでも回復させながら、福島第一原発事故の終息に役立つことができればと思います。
―期待しています。貴重なお話をありがとうございました。
お問合せ先
記事内容について
経済産業省 大臣官房 福島復興推進グループ 原子力発電所事故収束対応室
スペシャルコンテンツについて
長官官房 総務課 調査広報室
※掲載内容は公開日時点のものであり、時間経過などにともなって状況が異なっている場合もございます。あらかじめご了承ください。






最新記事
-

2025—日本が抱えているエネルギー問題(後編)
-

2025—日本が抱えているエネルギー問題(前編)
-
地熱発電も「次世代」へ!課題をクリアし日本の地熱を最大限に活用
-

柏崎刈羽原発6号機が再稼働―運転再開の重要性とその背景(後編)
-

屋根スペースを再エネに活かす!「屋根設置太陽光発電」の新たな報告制度とは
-

増加が見込まれるデータセンターの電力需要をどうする?さらなる省エネを進める新たな制度に注目!
-

日本のガソリン価格は世界と比べて安い?高い?中東情勢を踏まえた燃料油の「緊急的激変緩和措置」
-

柏崎刈羽原子力発電所6号機が再稼働―運転再開への道のり(前編)
-

自動車分野のGXへ、さまざまな支援策~購入補助から次世代燃料開発支援まで
-

世界で見直しがはじまった自動車産業政策〜日本の「マルチパスウェイ戦略」にも注目が



