福島第一原発「燃料デブリ」取り出しへの挑戦②~デブリ取り出しの難しさとは

2号機原子炉格納容器内部調査におけるペデスタル底部の様子(2018年1月)(一部加工)| 映像提供:国際廃炉研究開発機構(IRID)| 映像処理:東京電力ホールディングス株式会社
東京電力福島第一原子力発電所(福島第一原発)の廃炉に向けては、原子炉格納容器の内部にある「燃料デブリ」をどうやって取り出すかという課題があります。シリーズ第1回では、「燃料デブリ」とは何か、また福島第一原発1号機~4号機の現在の状況について、あらためてご紹介しました(「福島第一原発『燃料デブリ』取り出しへの挑戦①~燃料デブリとは?」参照)。第2回では、燃料デブリ取り出しの具体的な内容をご紹介しましょう。
なぜ燃料デブリ取り出しを2号機から始めるの?
福島第一原発の廃炉・汚染水対策は、政府が策定した「中長期ロードマップ」に基づいて、「復興と廃炉の両立」を大原則とし、安全確保を最優先に、リスクを低減することを重視するという姿勢のもとで進められています。2019年12月の中長期ロードマップの5回目の改訂では、燃料デブリについて、「初号機(最初に取り出しを着手する号機)の燃料デブリの取り出し方法を確定し、2021年内に2号機で試験的取り出しに着手し、その後、段階的に取り出し規模を拡大していくこと」を示しました。
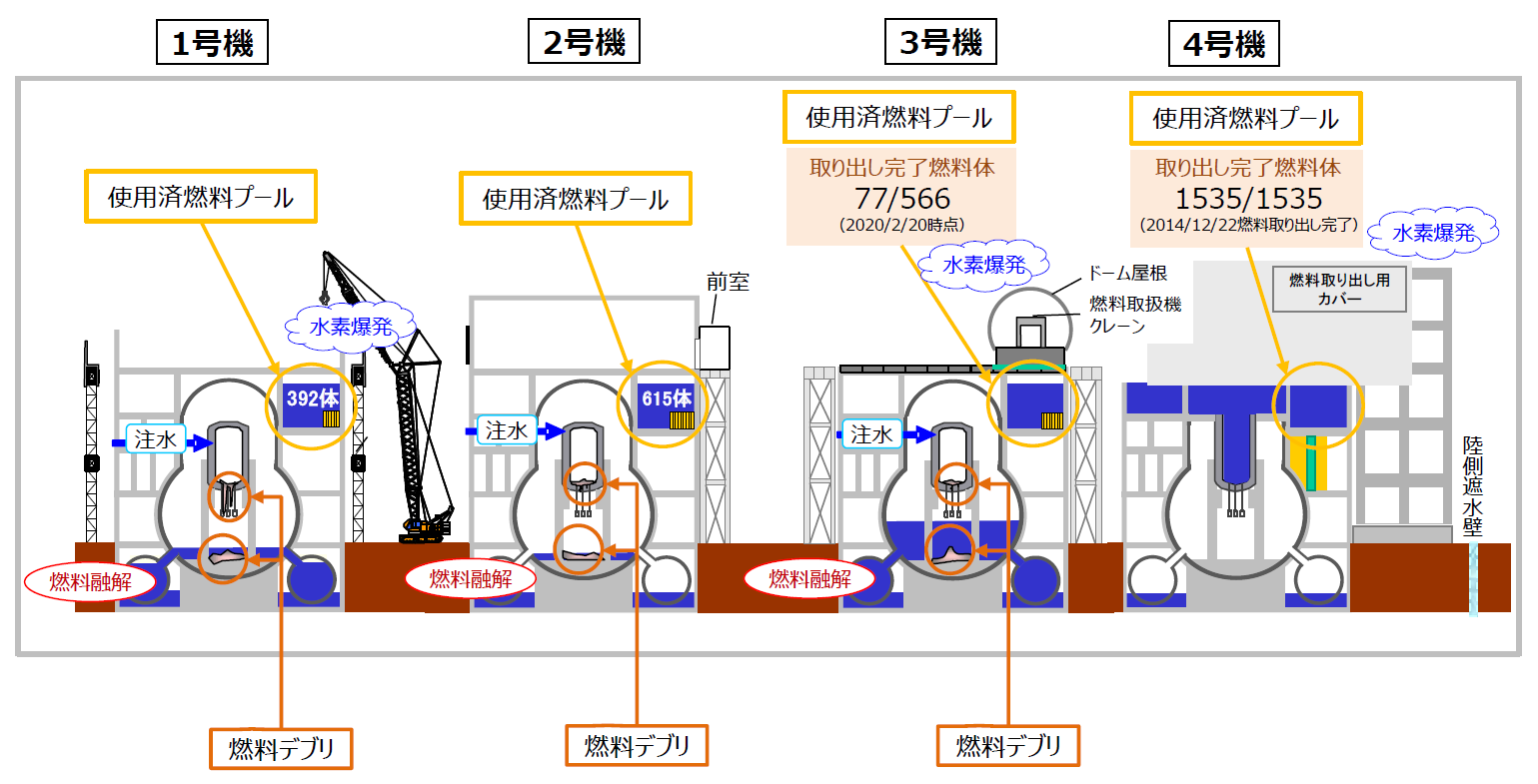
原子炉内部にあった燃料が溶けてさまざまな構造物と混じりながら固まることでできた燃料デブリは、福島第一原発の1号機・2号機・3号機の中にあります。
- 詳しく知りたい
- 福島第一原発「燃料デブリ」取り出しへの挑戦①~燃料デブリとは?
燃料デブリ取り出しを始める初号機は、2号機に確定しました。いったいなぜでしょうか?
下の表は、1号機・2号機・3号機それぞれの安全性や確実性などをくらべたものです。水素爆発を起こさなかった2号機は、水素爆発を起こして建屋の一部が壊れた1号機と3号機とくらべると、気密性が高く、放射性物質を閉じ込める機能が高いという特徴があります。福島第一原発の周辺地域では住民の帰還と復興の取り組みが徐々に進んでいます。そんな中、作業にともなって発生する、放射性物質を含んだダストの拡散をより抑制することが必要となるため、この「放射性物質を閉じ込める機能」は重要なポイントとなるのです。
また、2号機の原子炉建屋1階については環境整備が進んでおり、作業現場の放射線の線量も1号機・3号機にくらべて低くなっています。さらに、2号機では原子炉格納容器内部調査も進んでおり、燃料デブリにアクセスするルートや、燃料デブリの状況(どこにどのような状態で存在しているか)についても、もっとも多くの情報が得られています。加えて、こちらも重要な作業である「使用済燃料」の取り出しと並行して作業をおこなうことが可能です。
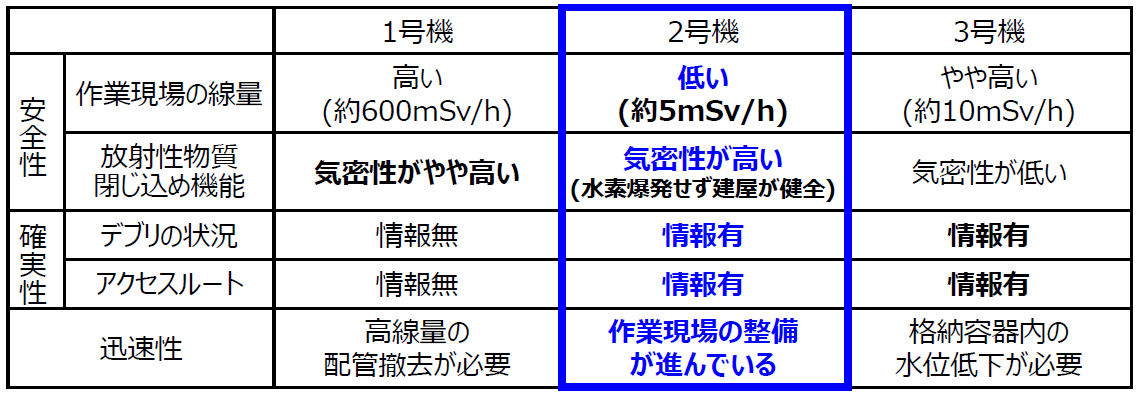
こうしたさまざまな条件を検討した結果、2号機が選ばれたのです。
原子炉格納容器の内部はどんな風になっているの?
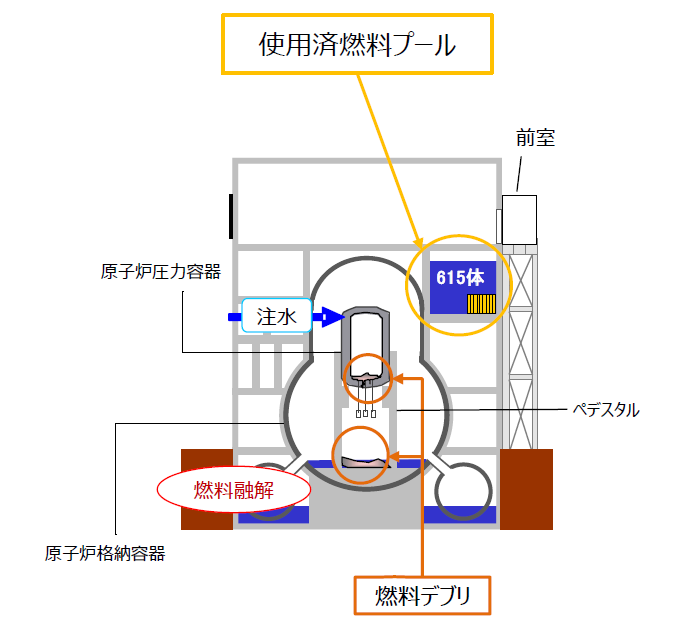
2号機では、原子炉格納容器の中にある「原子炉圧力容器」の内部に多くの燃料デブリが、また原子炉圧力容器を支えるコンクリート構造物「ペデスタル」の内側にも一定量の燃料デブリが存在していることがわかっています。
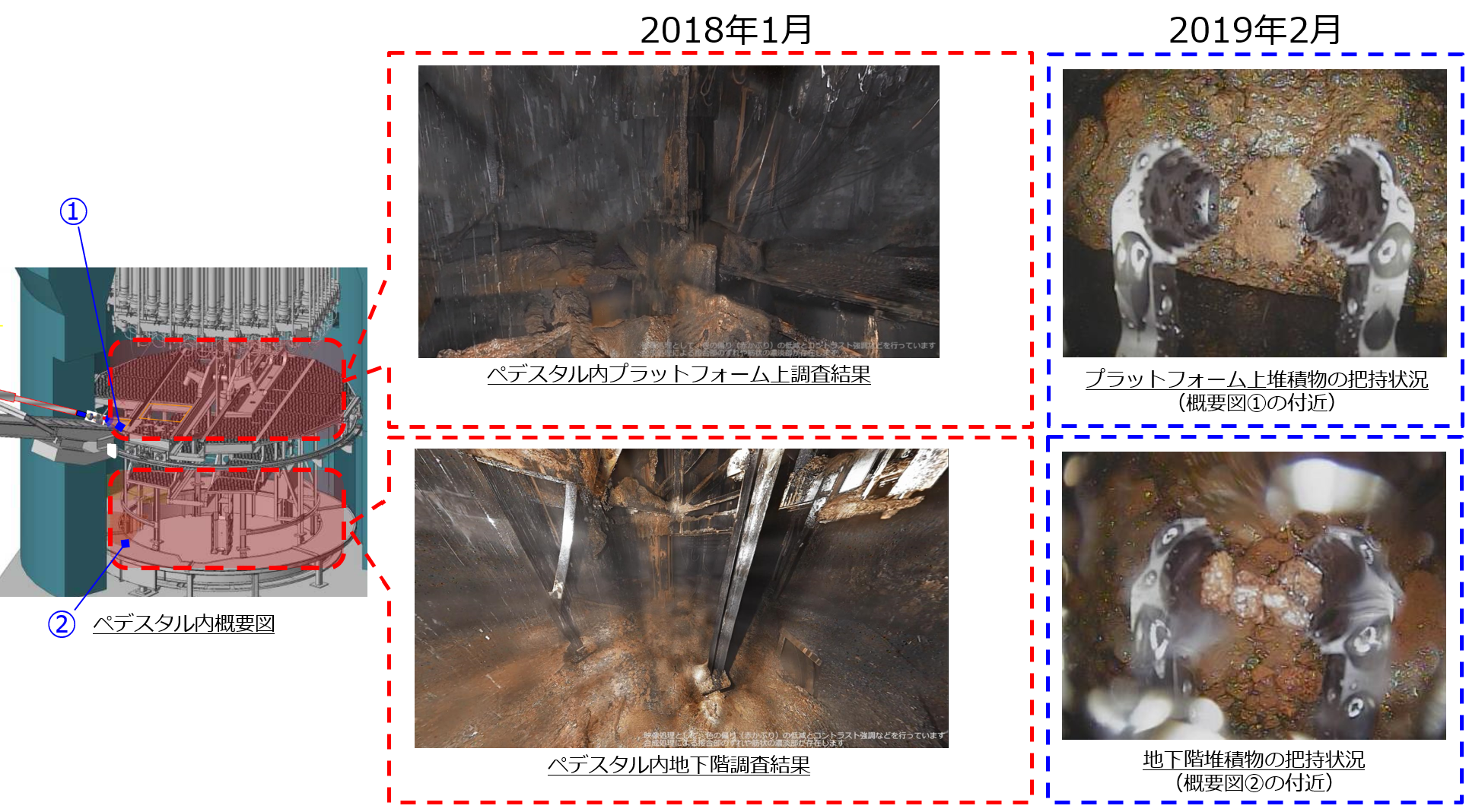
2018年1月と2019年2月におこなわれた原子炉格納容器の内部調査では、ペデスタル内側の作業用足場「プラットフォーム」上や地下階に機器をアクセスさせるのが可能であること、またペデスタル内側のプラットフォーム上や地下階には堆積物が存在しており、堆積物の一部はつかんで動かせることが確認されました。
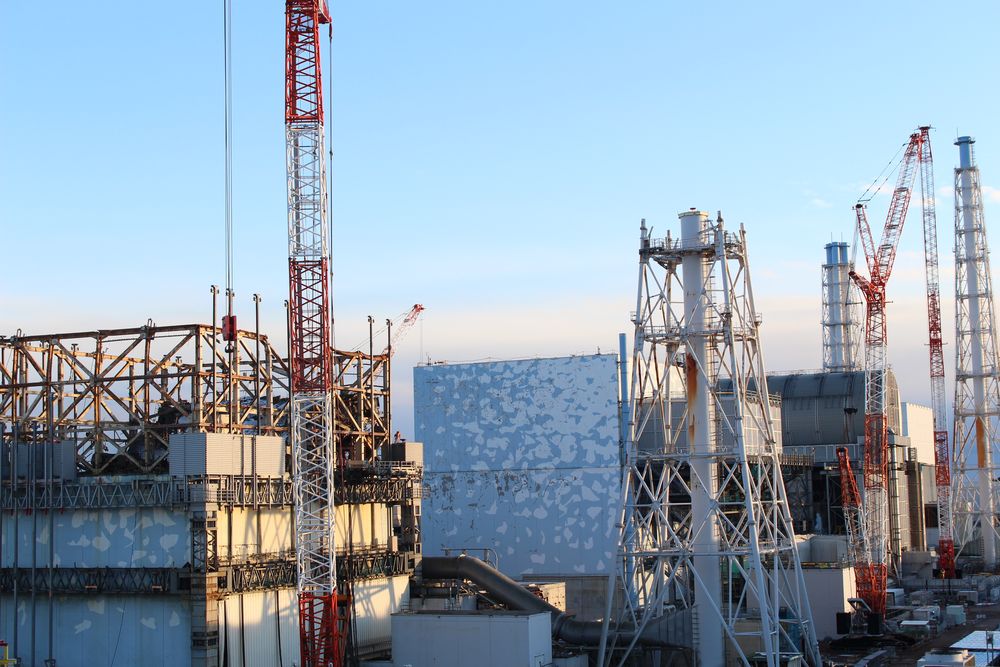
放射線量の高い格納容器内で燃料デブリにアクセスし、燃料デブリを取り出す方法として現在開発が進められているのが、遠隔で操作するロボットアームです。一方で、格納容器内は、かなり狭くさまざまな機器などもあり、複雑な空間となっています。2号機と同じ形状の5号機の内部で、その狭さと複雑さを見てみましょう(※5号機は地震発生時、定期点検中で、大きな損傷もなく、現在は停止している状態)。
まず、原子炉格納容器の内部へとアクセスする入口として考えられているのは、「格納容器貫通孔」とよばれるいくつかの貫通部のうち、原子炉の出力をコントロールするための「制御棒」を動かす装置を交換するための貫通部である「x-6ペネトレーション(x-6ペネ)」と呼ばれるところです。このx-6ペネは、格納容器内のペデスタル内側(原子炉圧力容器の下の燃料デブリが存在する場所)に直線的にアクセスできることから選ばれたのですが、下の写真のようにあまり大きなものではありません。

このx-6ペネの中には、堆積物やケーブルなどの障害物が存在していることがわかっており、内部にアクセスするためには、まずこれらを撤去する必要があります。この時、粉状になっている堆積物を水圧で流したり、ケーブルなどの障害物を切断して取りのぞこうとすると、作業中に放射性物質を含むダストが格納容器内で発生するおそれがあります。このため、しっかりと安全性を確保すべく、ダストを除去する既存設備(フィルターでダストを除去する設備)の処理量を増やすための準備や、ダスト飛散をより抑制するための作業方法の検討が進められています。
さらに、x-6ペネから格納容器内部に入った後は、ペデスタル内側(原子炉圧力容器の下の燃料デブリが存在する場所)にアクセスしなければなりません。
下の写真は、5号機のペデスタルの内側、原子炉圧力容器の真下にあたる場所です。スペースが狭く、人が立つことのできない高さしかないことがわかります。また、上からぶらさがっている制御棒の駆動装置などさまざまな装置があり、それを避けながら燃料デブリに到達するのも簡単ではなさそうです。

また、ペデスタル内側へのアクセス口もかなり狭く、傾斜がついています。

加えて、事故により格納容器内の状況が変化しており、燃料デブリや構造物の状況に関する情報も限定的で不確実性がある中、燃料デブリのある場所までアクセスし、燃料デブリを回収するには、さまざまな事態を想定して、事前にそれらの事態への対応策を検討の上、装置の設計などをおこなう必要があります。
これらを考え合わせると、ロボットアームが燃料デブリにアクセスするルートでは、すき間にあまり余裕がなく、すき間が想定よりも狭い可能性も予想されます。しかしその一方で、ロボットアームには、格納容器の外から圧力容器やペデスタル内側までの距離を途中でたわまずに伸びる強度が求められます。
こうしてみると、デブリ取り出しに使う機器には、これまでにない性能、格納容器内の状況が完全には分からない中でさまざまな事態を想定した開発が求められることがわかります。では、こうした状況を踏まえて、どのような技術開発が進められているのでしょうか?次回は、現在考えられているロボットアームの姿と、開発の現状をご紹介します。
お問合せ先
記事内容について
経済産業省 大臣官房 福島復興推進グループ 原子力発電所事故収束対応室
スペシャルコンテンツについて
長官官房 総務課 調査広報室
※掲載内容は公開日時点のものであり、時間経過などにともなって状況が異なっている場合もございます。あらかじめご了承ください。
あなたにオススメの記事






最新記事
-

2025—日本が抱えているエネルギー問題(前編)
-
地熱発電も「次世代」へ!課題をクリアし日本の地熱を最大限に活用
-

柏崎刈羽原発6号機が再稼働―運転再開の重要性とその背景(後編)
-

屋根スペースを再エネに活かす!「屋根設置太陽光発電」の新たな報告制度とは
-

増加が見込まれるデータセンターの電力需要をどうする?さらなる省エネを進める新たな制度に注目!
-

日本のガソリン価格は世界と比べて安い?高い?中東情勢を踏まえた燃料油の「緊急的激変緩和措置」
-

柏崎刈羽原子力発電所6号機が再稼働―運転再開への道のり(前編)
-

自動車分野のGXへ、さまざまな支援策~購入補助から次世代燃料開発支援まで
-

世界で見直しがはじまった自動車産業政策〜日本の「マルチパスウェイ戦略」にも注目が
-

27年4月からエアコンの新たな省エネ基準がスタート!エアコンについて知っておくべきポイントは?



