Fukushima Daiichi Nuclear Power Station The challenge of retrieving fuel debris Article No.3: The frontier of technological development
(in provisional translation)
(English ver.) 2020-07-27

(Picture) Provided by Veolia Nuclear Solutions (UK) Ltd.
Since the accident at TEPCO’s Fukushima Daiichi Nuclear Power Station (Fukushima Daiichi NPS) in March, 2011, efforts have been made toward decommissioning of the NPS. One of the challenges such efforts are facing is the retrieval of the material known as “fuel debris” that remains inside the reactor containment vessel. The first Article of this series provided a basic understanding of “fuel debris” and the current situation of reactors No.1 to 4. The second Article provided a detailed explanation of how fuel debris was to be retrieved and what challenges were envisaged. This third Article focuses on devices under development toward the retrieval of fuel debris, which is an unprecedented challenge.
Robot arm, a sophisticated device for the retrieval of fuel debris
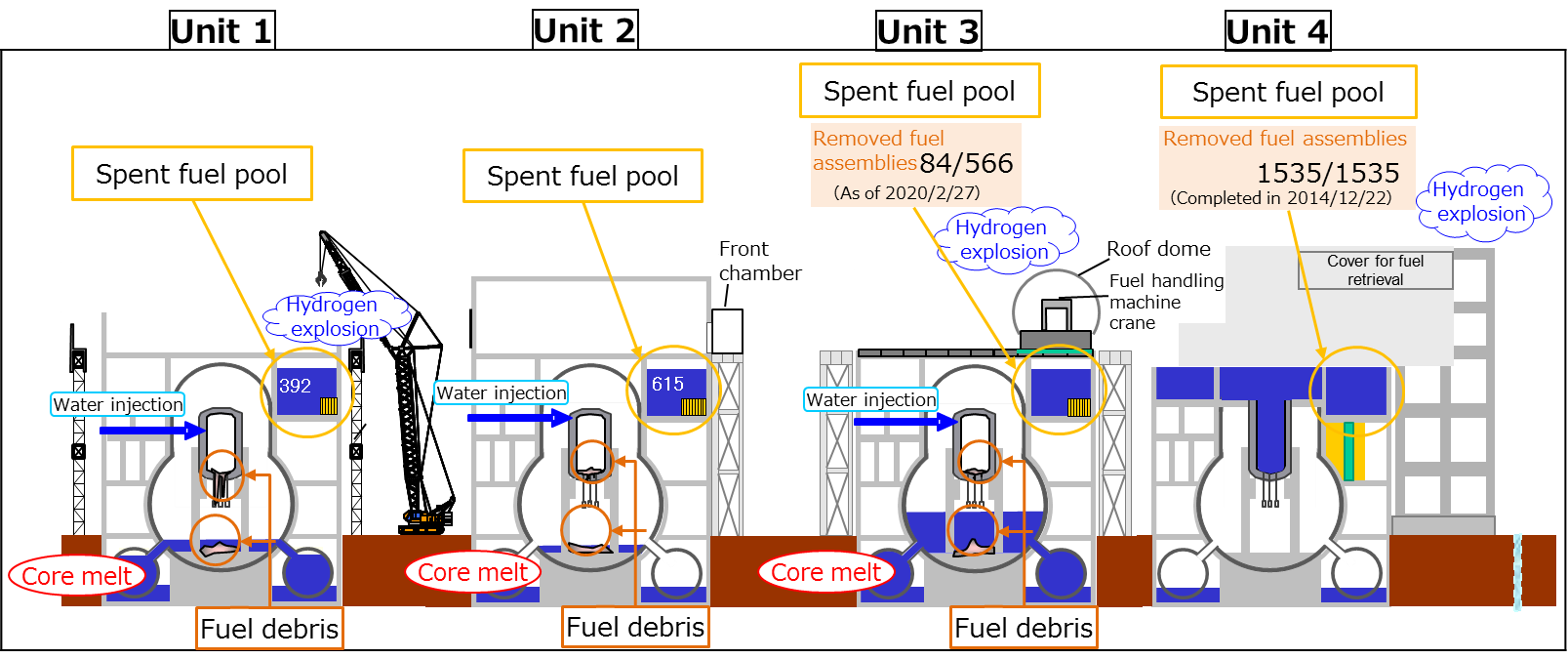
During the accident at the NPS, nuclear fuel, along with other structural debris, melted down and solidified inside the reactor. This is referred to as fuel debris and it remains in Units 1, 2 and 3. Unit 2 has been selected as the first implementing unit for fuel debris retrieval.
As explained in the second article, it is an extremely difficult task to access fuel debris that remains within the pedestal, which is a concrete structure supporting the reactor pressure vessel. It is impossible for a human to get inside the reactor containment vessel where radioactivity is intolerably high. The inside of the containment vessel is small with a complex structure. One of the existing openings leading to the inside of the containment vessel provides a potential entry point to the inside of the reactor. However, it is not a large opening. Furthermore, the inside of the pedestal itself is narrow, with rubble scattered around due to the accident.
In addition to the difficulties described above, the situation inside the Unit 2 reactor containment vessel may have changed by the accident. Uncertainties exist with only the limited information available on fuel debris and structures. Therefore, various contingencies must be considered and planned for in advance. Devices that can access and remove the fuel debris must be designed based on such considerations.
Additionally, only the surface of the solidified material has been inspected. It is not yet known how hard it is below the surface. If it had solidified with hard material such as pebbles, it might be necessary to cut it into pieces before retrieval.
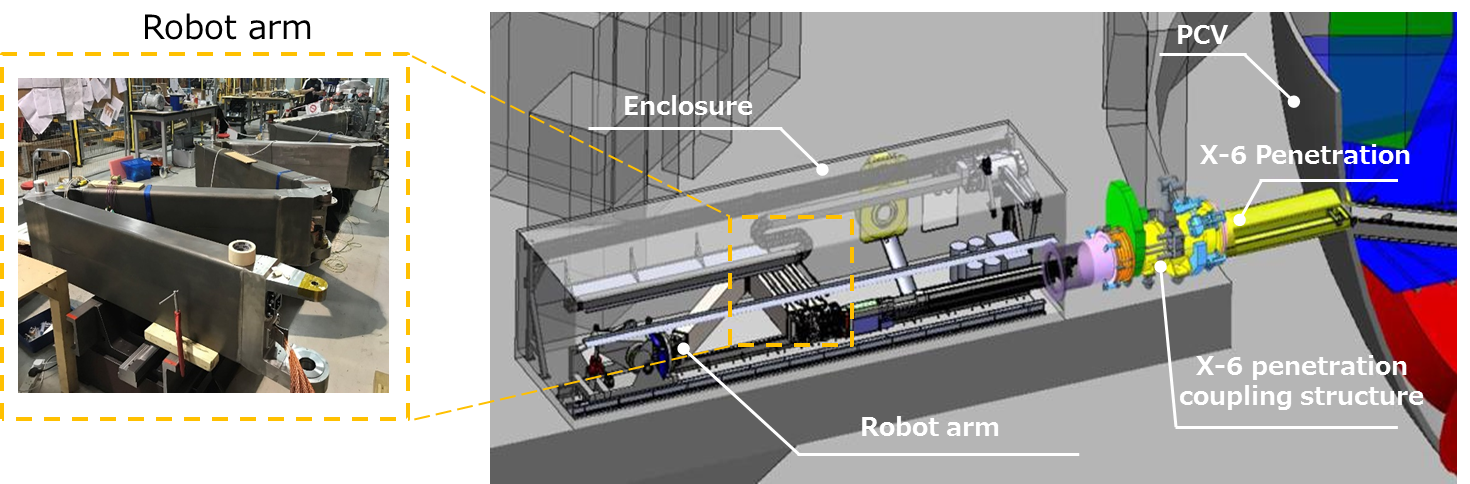
A robot arm, which is currently under development for the fuel debris retrieval, will have the capabilities to cope with those difficulties. In order to suppress the spread of the dust, a specially designed box referred to as the “enclosure” will maintain a seal around the equipment as shown in the following illustration.
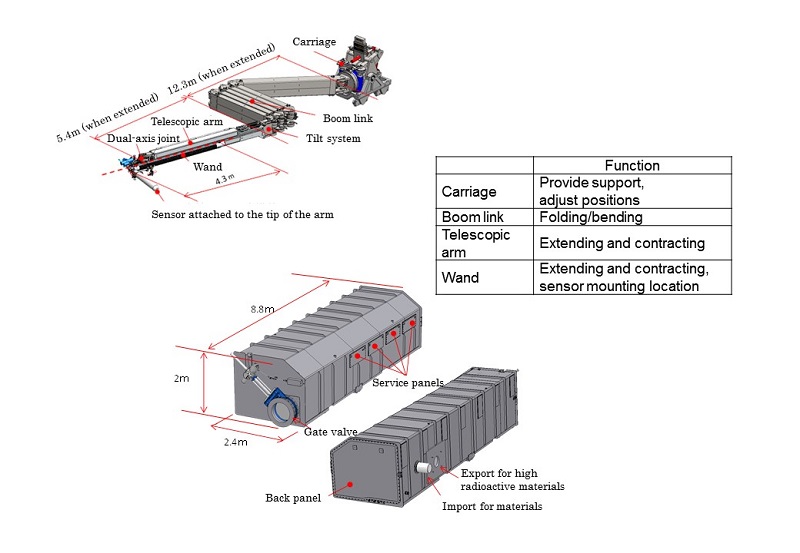
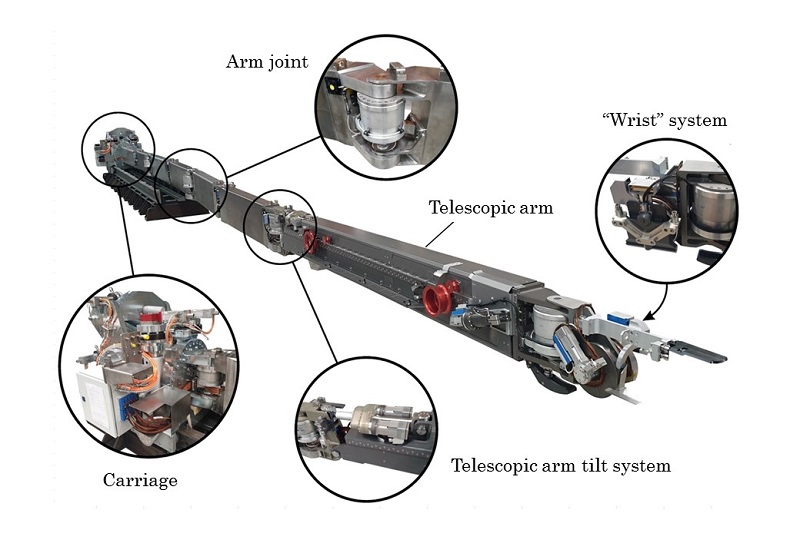
The robot arm folded in the enclosure will stretch itself like an accordion to reach the base of the pressure vessel and the inside of the pedestal. It is made of metal with sufficient strength to allow it to lengthen to get inside of the pressure vessel and pedestal without bending substantially.
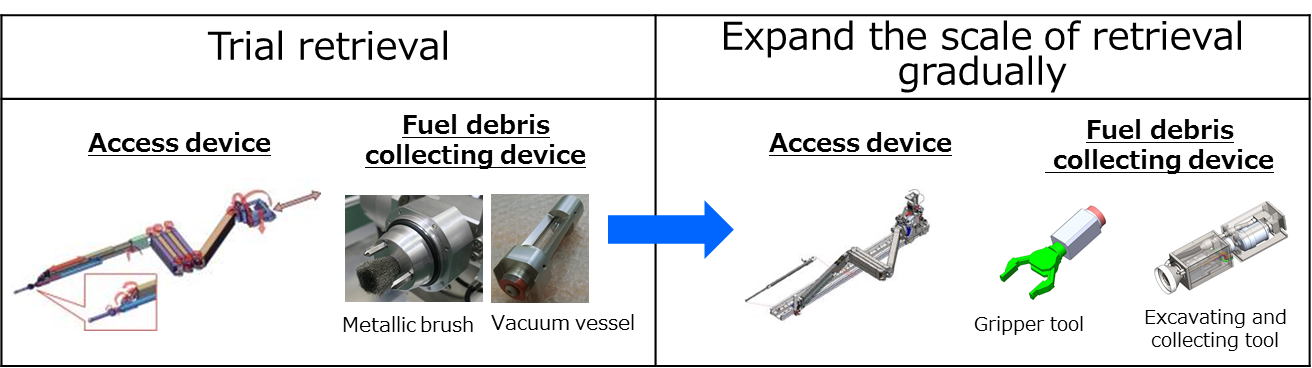
What does the tip of the robot arm look like? Both a “metallic brush”, which will brush the debris into small particles, and a “vacuum vessel” to collect the particles using suction, are under development toward trial retrieval. After the trial, graduated scale expansion for retrieval is planned. Under consideration for future stages are devices such as a “gripper tool” to grab heavier objects and an “excavating and collecting tool” to crush the debris into pieces and collect them.
The robot arm is being developed by Mitsubishi Heavy Industries, Ltd. in close collaboration with Veolia Nuclear Solutions (UK) ltd.
Interview with engineers who are engaged in the development of the robot arm How do they feel in undertaking this difficult mission?
Let’s ask engineers of Mitsubishi Heavy Industries Ltd. (MHI) about the current status of the development.

Pictures of MHI engineers
Mr. Tsujita Yoshihiro (left) and Mr. Ueda Takeshi (right)
―Question: What sort of equipment are you developing?
Mr. Ueda We are developing a robot arm to retrieve fuel debris that remains within Unit 2 of TEPCO’s Fukushima Daiichi NPS. The robot arm is to enter the Primary Containment Vessel (PCV) through an opening, or penetration and reach the fuel debris.
Mr. Tsujita The robot arm will be stored in a box-like enclosure as shown in the illustrations below, which will then be installed beside the penetration. The arm will stretch from the enclosure inside the PCV through the penetration to retrieve fuel debris with a “metallic brush” and/or a “vacuum vessel”. At the same time, investigations will be conducted using a sensor attached to the tip of the arm to analyze the dispersion of fuel debris and the structures inside the PCV.
Mr. Ueda Should the lid of the penetration be removed, radioactive material would leak out. Therefore, it is necessary to build an enclosure surrounding the penetration and then open the lid so that radioactive material never leak out of the enclosure.
Mr. Tsujita The picture below shows the robot arm currently under development.
―Question: What aspects do you think are the most difficult in the whole process of development?

Mr. Ueda First of all, the place we want to investigate, where the fuel debris is located, is far away from the X-6 penetration through which the arm will enter the PCV. Judging from the photographs of the inside, the distance is ten or so meters, over which the arm must stretch and retrieve the fuel debris with the devices attached to its tip. Additionally, an investigation must be conducted with the sensor.
Mr. Tsujita We would normally design the arm with sufficient strength so that it will not bend when being stretched to a desired length. In this instance, however, as the diameter of the x-6 penetration is only 600mm, the arm must be designed with size constraints to ensure that it can fit through the penetration. In other words, we cannot use a structurally large design. Furthermore, under normal circumstances, we would accurately measure the size of the opening before designing the arm, which is not possible in this instance because Unit 2 PCV is not accessible by humans. We can only rely on the information obtainable from the design drawings and pictures (videos) when designing the arm. We, as engineers, want to make it larger to provide structural support, but if we do so, it might get stuck. If the design is too small, it will bend. It is very difficult to accomplish these two conflicting objectives.
Mr. Ueda Another difficulty is the lack of information about the inside of the PCV. Brief investigations have already been conducted, but there is no additional information other than those investigations. For example, there might be some places where the shape has changed due to the accident. With such places, there are risks of the arm colliding and being broken. Since we have no precise information, we need to be cautious in operating the arm.
―Question: Were there any similar technologies that could be relied upon for designing the robot arm?
Mr. Ueda MHI has used remote-controlled robots in many nuclear reactors for maintenance and other facilities. We also have some experience in robot arms. This time, however, we are facing the very difficult challenge of designing a long robot arm to enter the narrow, cramped, X-6 penetration to reach a distant place. Therefore, we are collaborating with Veolia Nuclear Solutions (UK) Ltd. (commonly known as “Oxford Technologies Ltd.”) for the development of the robot arm. We selected the English company, having examined and screened various technologies from around the world. They develop nuclear fusion reactors and conduct remote controlled operations using a long “multiple joint arm” for the maintenance of such reactors. We thought their technology was suitable to our objective and decided to adopt it for the development of our robot arm.
Mr. Tsujita We have studied the information available on the reactor as well as operating conditions and methods. As a result, we presented conditions of design to Oxford Technologies Ltd. and Oxford Technologies Ltd. is designing and producing the equipment together with operating systems based on those conditions. As it is a new development, instead of a one-way flow of information, we cooperate by holding technical discussions from time to time throughout the design and production process.
―Question: Will sophisticated technology be necessary for operating the arm after it is built?
Mr. Ueda Yes. We need to operate while adjusting 18 axes.

Picture of Mr. Tsujita
Mr. Tsujita It may be possible for an operator to maintain fine control of those axes only by monitoring each of them through cameras. However, it would place a significant stress on any such operator, and therefore, it would not be a recommendable option. Instead, we are now planning to write programs which are able to operate each axis, so that it can reduce the burden of operator. We are building a mockup (full-size replica) of the PCV for testing those programs. That being said, the inside of Unit 2 might not be exactly the same as the mockup. If the actual size and shape are not the same as they were thought to be, we would then stop to decide on the next move. The route to be taken should be determined in advance with a detailed procedure prepared. If anything unexpected happens, we will stop the arm immediately to assess the situation based on the available information. This is our basic attitude in undertaking the mission.
Mr. Ueda We will utilize a simple mockup in England to see if the arm can reach inside the pedestal. Then, we will construct a more precise mockup in Naraha Town in Fukushima Prefecture, where we will test remote control methods for an arm equipped with a metallic brush, a vacuum vessel and a sensor. We will also train the robot arm operators there. We think that we can rectify any malfunctioning though mockup tests before using the robot arm in PCV.
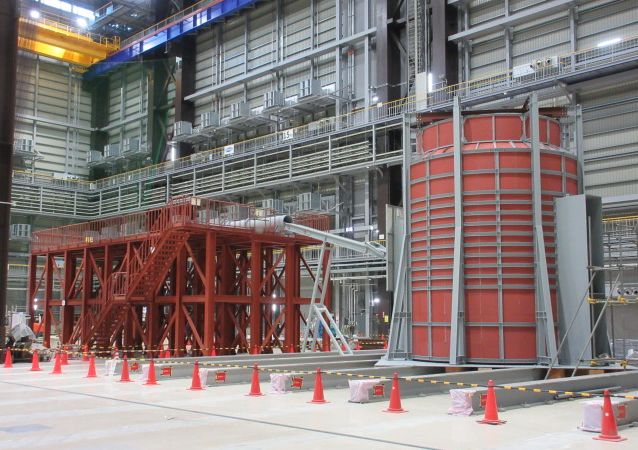
(Picture) A mockup (full-size replica) of the PCV being built in Naraha Town in Fukushima Prefecture
―Question: How far from the arm is the control point to be located?
Mr. Ueda The control point will be established approximately 100 meters away from the arm. The self-propelled arm can reach the X-6 penetration without human assistance. However, there will be several tasks that cannot be completed by remote control and which therefore need to be conducted manually, such as installing cables and hoses which could be damaged if dragged, and installing lighting and cameras. It means that humans are required to work in a highly radioactive location, limiting the allowable continuous working time. Should there be any malfunctions, there would be restrictions on time allowed for any repair work at the location. That is a challenge we will face.
―Question: Will you please speak about your enthusiasm for the mission?
Mr. Ueda We have every intention of carrying out the project successfully. Although we may face more challenges in the future, we are confident that we will eventually succeed by bringing together all the knowledge from stakeholders in the project.
Mr. Tsujita We think that fuel debris retrieval will be the first step that is critical to the stabilization of the situation at Fukushima Daiichi NPS. We will tackle this difficult task systematically, and ultimately, we will be successful. We are addressing current issues in a concrete manner step by step. We would like to contribute to regaining public trust. We hope that our efforts will be useful in resolving the situation at the Fukushima Daiichi NPS.
Closing remarks by the interviewer: We wish you every success in your efforts. Thank you very much for sharing such valuable information with us.
Division in charge
About the article
Nuclear Accident Response Office, Electricity and Gas Industry Department
About Special Contents
Research and Public Relations Office, Policy Planning and Coordination Division, Commissionerʼs Secretariat
![]() The original Japanese text of this article; Click here
The original Japanese text of this article; Click here